灵巧手关节技术路线之争:解密陶世环面包络蜗轮蜗杆的破局密码
在仿人机器人产业爆发的2025年,灵巧手关节作为执行机构的核心部件,其设计方案的优劣直接决定了抓取精度、负载能力与使用寿命。本文深度解析当前主流技术路线——腱绳传动、微型伺服电缸与陶世环面包络蜗轮蜗杆减速机的技术差异,揭示新一代传动方案如何重塑行业标准。
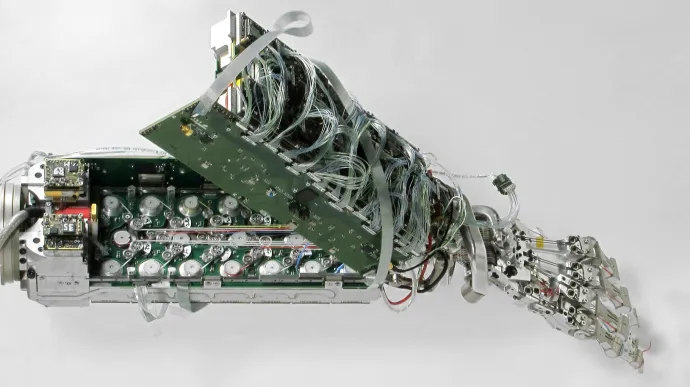
一、键绳传动优缺点
对比分析
优势分析
1. 结构灵活性与轻量化
· 通过模拟人体肌腱结构,腱绳可将驱动器远离执行端,显著减轻末端负载和惯量。
· 单根腱绳重量轻,适合空间狭小、需多自由度布局的场景,可让灵巧手自由度更高。
2. 柔性传动与抗冲击
· 腱绳可承受弯曲和拉伸,在碰撞或意外载荷下通过弹性形变缓冲冲击力,降低机械损伤风险。
· 采用UHMWPE(超高分子量聚乙烯纤维)材料时,强度可达钢材的15倍,同时保持轻质特性。
3. 布线适配性高
· 腱绳可沿复杂路径布线(如通过导管或滑轮组),支持非直线传动,适应灵巧手仿生设计需求。
劣势分析
1. 精度与寿命限制
· 运动精度通常为±0.1mm,且长期使用后易因磨损导致张力松弛,需频繁校准。
· 典型负载寿命短,需定期更换腱绳,维护成本较高。
2. 环境敏感性
· 高分子材料腱绳在高温或化学腐蚀环境下易老化;钢丝绳虽耐温但易因反复弯折断裂,并且重量过重。
3. 无自锁性能
· 需要安装额外的刹车模块,长时间抓握需要额外耗能。
4. 响应速度慢
· 因绳缆弹性形变延迟,大概响应速度在20-50ms,较丝杆10-15ms慢,陶世减速机响应速度<5ms(电机直驱+刚性传动)。
5. 调节难度高
· 绳索的张力和路径需要精确调整,可能需要复杂的调整机制。
6. 抓握易滑落
· 绳驱灵巧手缺乏刚度,抓握重物张力过大导致让力,容易握滑脱。
二、微型伺服电缸优缺点
对比分析

优势分析
1. 高精度与高负载能力
· 滚动丝杠(如行星滚柱丝杠)定位精度可达±0.03mm,且能承受10-100N级轴向负载,适合精密抓取场景。
2. 长寿命与稳定性
· 滚珠或滚柱结构减少滑动摩擦,寿命较长,但日常丝杆需要注意防护,注意粉尘油污等场景,否则极易损坏。
3. 部分自锁与力控优势
· 部分丝杠(如滑动丝杠)具有伪自锁特性,断电时可保持一定握力,断电后较为缓慢的松开,类似阻尼效果。若需要保持握力,需要刹车系统不断供电。
劣势分析
1. 体积与重量制约
· 微型丝杠模组重量普遍在20-35g,较腱绳方案(15-30g)增加约30%,限制高密度关节布局。
· 复杂传动结构占用空间大,需牺牲部分自由度数量。
2. 成本与维护门槛
· 行星滚柱丝杠单价高,加工精度要求纳米级。
·安装需严格校准同轴度,维护难度高于腱绳系统。
3. 抗冲击能力较弱
·刚性传动结构在突发载荷下易发生卡滞或变形,需额外设计缓冲机构。
4. 使用环境受限
·因丝杆的特殊性,对于使用环境有较高要求,否则因粉尘颗粒等进入关节处,将极大缩短使用寿命,甚至当场损坏。
5. 自由度不足
· 因为行星滚柱丝杠加上电机体积较大,所以一般部署在手掌里面,一般为6自由度或者10自由度,而且手掌里也部署线路板之类导致手掌特别厚。
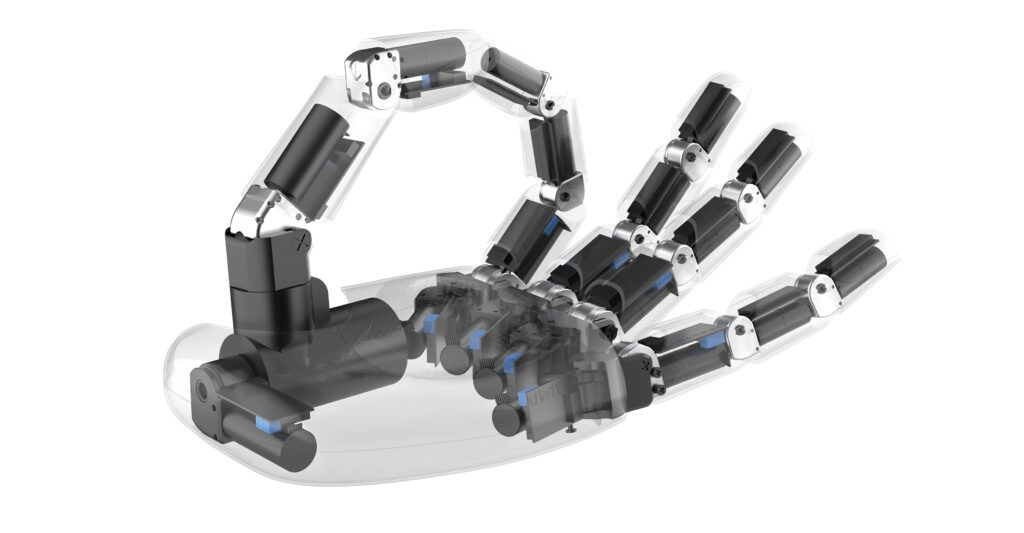
三、陶世环面包络蜗轮蜗杆传动优缺点
对比分析

优势分析
1. 高精度与高负载能力
· 陶世环面包络蜗轮蜗杆减速机定位精度可达±0.015mm,且能承受56-300N级轴向负载,适合精密抓取场景。
· 单关节峰值扭矩可达6NM,额定扭矩可达3NM。
2. 没有传递刚性与精度误差
· 环面包络减速机,直驱传动,没有传递刚性误差,没有传递精度误差。
3. 空间占用极少
· 一体化关节模组,体积小、扭矩大,同等扭矩下,体积至少减少30%。
· 单关节减速机重量仅9-49g。天然90°传动,无需额外转向。
4. 使用寿命长
· 运转寿命长达1万小时以上。负载运转次数达10万次以上。
· IP65级防护,可在复杂环境中使用,适用于极端气候环境。
5. 自锁与力控优势
· 100%自锁性能,在抓握住东西之后,无需额外供电,便能长时间抓握。
6. 散热性能好
· 长时间运转,温度始终保持在50℃左右,确保电机、减速机的稳定运行。
7. 综合性能领先
· 陶世环面包络多齿啮合设计,让减速机噪音低至50分贝以下。
· 抗拉强度高达1300兆帕,抗冲击能力较丝杆提升至少3倍。
8. 成本更低
· 陶世减速机结构简单,从物理层面上判断,齿轮组相较于丝杆、谐波等装置,数量更少,结构更简单,装配更容易。所以量产后成本更低。

环面包络蜗轮蜗杆与普通蜗轮蜗杆对比
劣势分析
1. 传动效率较低
· 陶世环面包络多齿啮合结构较传统蜗轮蜗杆结构效率高出至少100%,可达60%-90%,与键绳相当。但因自带自锁功能,实际综合能耗更低。
2. 柔性不足
· 因纯刚性结构,没有键绳那样柔性,更适合工业场景,或高灵敏度场景。
结语
键绳:如果需要高灵活性(如科研、教育、家用场景等),对扭矩、精度要求不高的场景,键绳方式是比较合适的选择。
微型伺服电缸:如果需要高精度和力控能力(如服务机器人,精密装配场景等),微型伺服电缸是比较合适的选择。
高精密蜗轮蜗杆结构:如果需要高负载、带自锁特性(如工业机器人,重型抓取等),高精密蜗轮蜗杆结构更合适。
